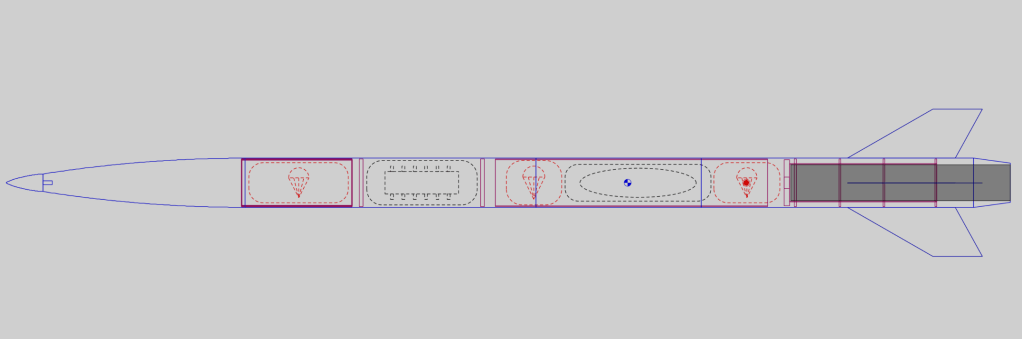
The payload in this project adheres to the 3U CubeSAT standard and includes three advanced IMU sensors (10-DoF MEMS IMU sensor [SEN0140], 9DOF IMU AHRS sensor module, and 9-axis IMU LSM9DS1 module) to measure vibration, acceleration, and angular velocity, aiming to validate sensor durability and vibration resistance under launch conditions, comparing data over altitude and velocity for performance reliability, with sensors placed at distinct locations within the CubeSAT for comparative analysis and optimal sensor layouts, using an NVIDIA Jetson Nano J101 Carrier Board for real-time data processing and attitude control to stabilize the CubeSAT and support RCS for precise orientation adjustments, ensuring stability and data collection capability assessments in extreme conditions.
Components and Functions of the Payload
10-DoF MEMS IMU Sensor [SEN0140]
Role: Provides multidimensional data, including altitude, acceleration, angular velocity, and magnetic field readings, for real-time monitoring of physical conditions.
Function: Compact and precise, this MEMS-based sensor delivers high-accuracy data under harsh conditions, especially during launch phases.
Features: Offers combined altitude and acceleration data to monitor CubeSAT’s response to changes in position and shock during launch, aiding in sensor stability assessments.
9DOF IMU AHRS Sensor Module
Role: Tracks CubeSAT orientation through a 9-axis accelerometer, gyroscope, and magnetometer, providing accurate data on orientation changes.
Function: Operates as an inertial navigation system, consistently tracking orientation under strong vibrations and accelerationvariations.
Features: With its gyroscope and accelerometer, the module provides steady orientation data even at high speeds, essential for evaluating sensor durability.
9-Axis IMU LSM9DS1 Module (DoF SparkFun 9DoF IMU Breakout – LSM9DS1)
Role: Tracks minute orientation shifts with high sensitivity to vibrations and external forces, working closely with the RCS for orientation control.
Function: This IMU gathers acceleration, gyroscopic, and magnetic data in real time, helping maintain CubeSAT stability.
Features: Captures physical changes in-flight, supporting stability analyses to enhance precise attitude control in future designs.
NVIDIA Jetson Nano J101 Carrier Board
Role: Processes data from the IMUs and controls the RCS, providing real-time attitude management.
Function: The Jetson Nano integrates data and runs algorithms to adjust CubeSAT orientation in response to flight dynamics.
Features: Capable of handling in-flight data analysis and attitude adjustments, setting a foundation for autonomous CubeSAT management.
Payload Functionality and Mission Objectives
This payload is classified as functional, actively collecting real-time data throughout the launch and flight, with the ability to adjust orientation to withstand vibration impacts in extreme conditions. By analyzing and comparing each sensor’s data, the payload enhances CubeSAT reliability, aiming to refine high-precision data systems and optimize attitude control.

댓글 남기기